




2021年10月17日,2021中国自动化大会Workshop“信息物理系统的决策、优化与安全控制”采用线上直播的方式成功召开。
本次Workshop由中国自动化学会主办,上海交通大学协办。此次论坛旨在总结并研讨近年来信息物理系统决策、优化与安全控制领域所取得的前沿成果,促进本领域以及相关学科领域专家学者的合作交流,推动理论研究与应用的密切结合。
会议主席由上海交通大学殷翔副教授和邹媛媛教授担任。会议邀请浙江大学程鹏教授、华东理工大学唐漾教授、清华大学莫一林副教授、东北大学李渝哲教授以及北京理工大学吕茂斌教授五位专家分享他们的最新研究成果,引起了与会专家学者与在线观众的热烈反响,会议在线观看直播人数超过500人。
首先,清华大学莫一林教授做了题为“信息物理系统的安全信息融合”的报告。莫教授针对常见的传感器信息完整性攻击,介绍了信息物理系统中多传感器信息融合中存在的安全问题,并提出了安全且高效的信息融合与估计算法。
华东理工大学唐漾教授做了题为“多智能体系统分布式优化与安全控制”的报告。唐教授主要通过对多智能体系统分布式优化与安全控制的进展和成果进行总结与回顾,指出了当前研究中存在的问题,并介绍了其课题组在多智能体安全控制和分布式优化的研究进展和成果。
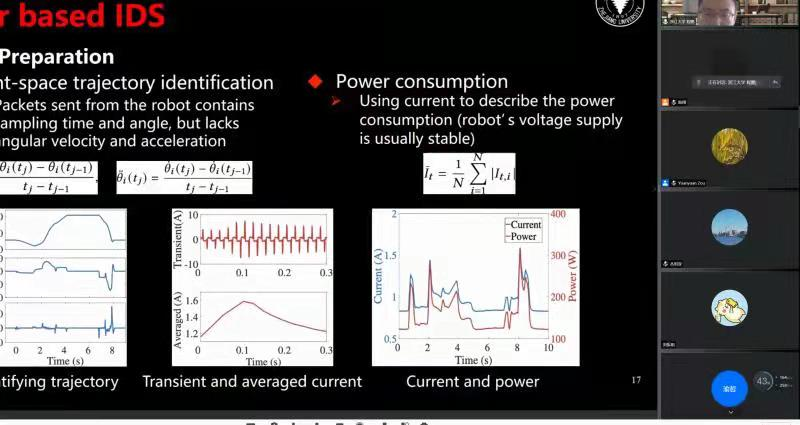
浙江大学程鹏教授做了题为“工业机械臂信息物理安全分析与检测”的报告。程教授探讨了工业机械臂应用中存在的信息物理安全威胁,通过结合机械臂动态特征,设计并实现了基于功率指纹的入侵检测系统,并介绍了该方法在多款机械臂上对高隐蔽性持续攻击的检测性能。
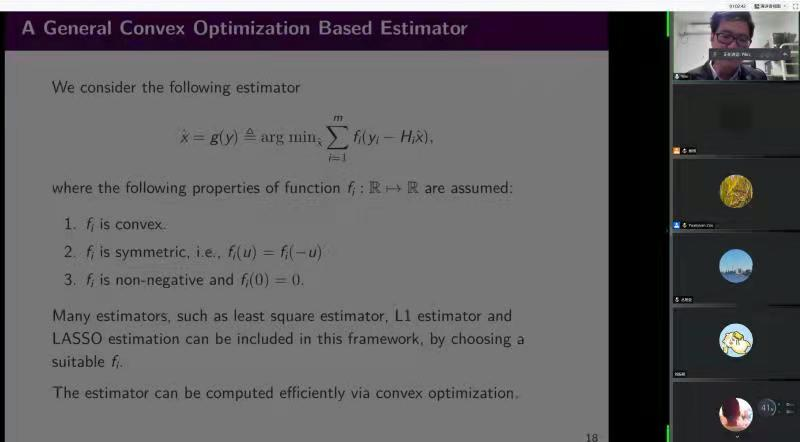
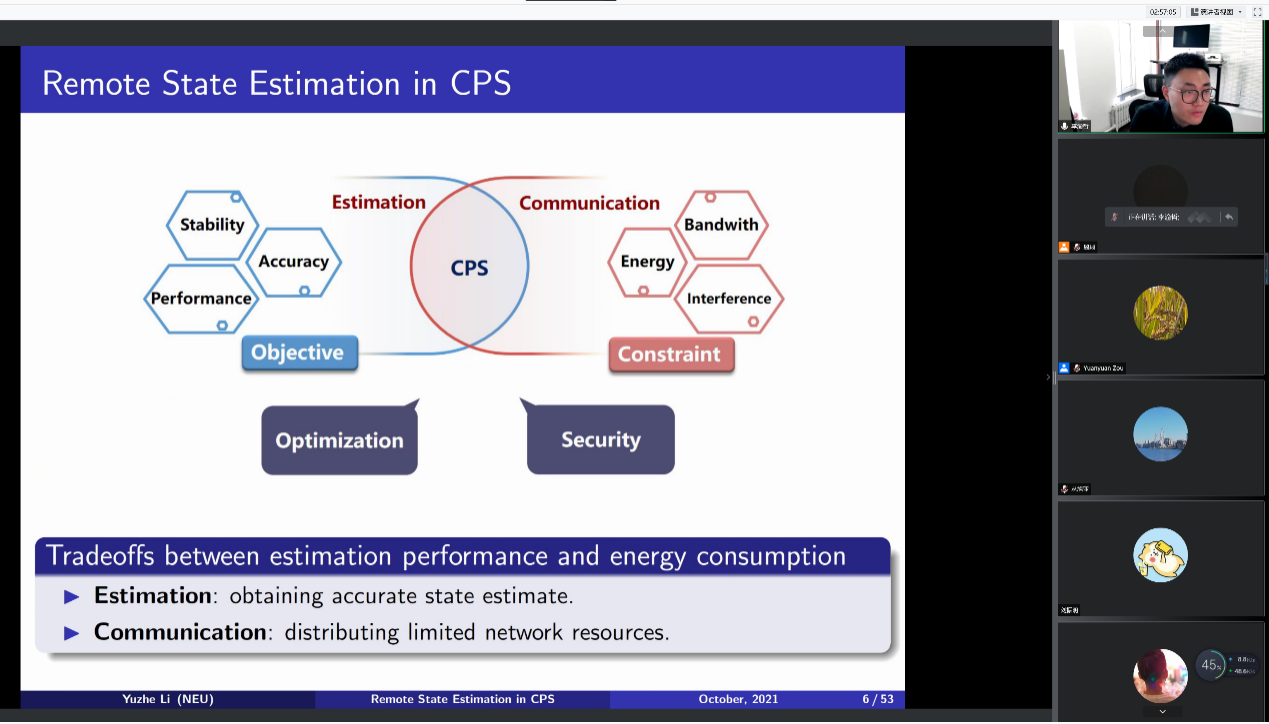
东北大学李渝哲教授做了题为“Remote State Estimation in Cyber-Physical Systems: from Power Control to Security”的报告。李教授介绍了其课题组近期在功率控制以及远程状态估计问题中的最新研究进展,提出了基于马尔可夫博弈理论的最有估计与信息传输策略的设计方法。
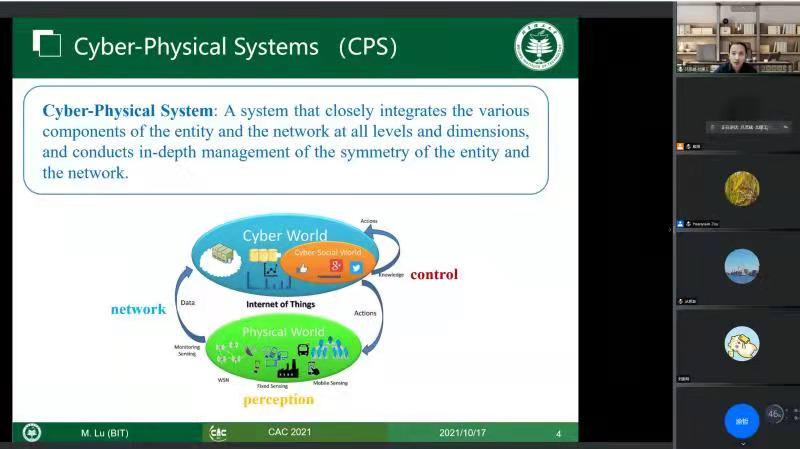
北京理工大学吕茂斌教授做了题为“Distributed State Estimation Under Jointly Connected Switching Networks”的报告。吕教授介绍了多智能体系统分布式状态估计的问题设定与研究进展,在此基础上针对一类线性时不变系统,提出了基于能观性分解方法的分布式观测器设计方法,并证明了其在通信连通网络下估计误差的收敛性。
最后,论坛主席殷翔副教授与邹媛媛教授对本次论坛进行了总结,并对参与本次论坛的讲座嘉宾和同学的大力支持表示感谢。会议的成功召开对信息物理系统决策、优化与安全研究中的若干重要发展方向进行了研讨,具有积极的指导意义。
